همزن های خورشیدی و کاربرد آنها در ساخت پلاستی سولها(Plastisols)
امولسیون پلیمریزاسیون از وینیل کلراید، لاتکس PVC را به دست می دهد که پس از خشک شدن و کلوخه شکنی، در آن ذرات شکل کروی با تخلخل بسیار کم از 0.5 تا چند میکرون اندازه تشکیل می شود، که به آنها رزین پراکنده گفته می شود. هنگامی که رزینها در یک روغن (پلاستیک ساز) تحت نیروی برشی متوسط مخلوط شوند، تشکیل خمیر میدهند، که آن را معمولاً پلاستیکول مینامند. کنترل دقیق اندازه ذرات لاتکس در مرحله پلیمریزاسیون به منظور کنترل خصوصیات حرکتی (rheological) پلاستیکول برای تبدیل بعدی به محصولات نهایی ضروری است. در مورد اثر توزیع اندازه ذرات در ویسکوزیته پلاستیکول ها در مقالات علمی تاکید شده است که ویسکوزیته سیستم های دیسپرس بستگی به راندمان توزیع ذرات پلیمر و پس از آن به مقدار پلاستی سایزر (Plasticizer) باقی مانده برای رقیق کنده ذرات پراکنده موجود در حفره های بین ذرات دارد. به طور کلی، رزین های ریزتر، ویسکوزیته و اتساع (dilatancy پدیده ای که برخی مایعات در اثر نیروی برشی یا فشاربالا سفت شده و حالت جامد بخود می گیرند) بیشتری دارند. به منظور کاهش این اثرات از مخلوط رزینهای پراکندگی (dispersion resins) و رزینهای اختلاط (blending resins) استفاده می شود.
در فرمولاسیون کاربردهایی مثل پوشش ها، قالب گیری، و پرینت اسکرین، از پلاستی سولها استفاده می شود. که با پراکندن ذرات رزین PVC در یک مایع پلاستی سایزر ساخت می شوند. افزون بر این، پرکننده ها، رنگ دانه ها نیز از دیگر افزودنی ها این فرایند هستند.

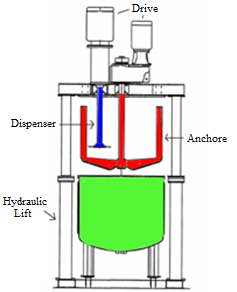
در تولید پلاستی سولها، میکسرهای چند محوره (Multi-Shaft Mixers) بهترین عملکرد را دارند. با اینهمه فرایند فرمولاسیون هایی که بیشینه گرانروی در آنها بیش از یک میلیون cP میباشد را بهتر است در پراکنده سازهای خورشیدی (Planetary Dispersers) و همزن های خورشیدی دوبل اجرا کرد. شکل زیر این دو نوع همزن را نشان می دهد.
این تجهیزات دارای دو یا چند پروانه هستند که هم حول محورهای خود می چرخند و هم دورادور مخزن اختلاط دوران دارند. برخلاف همزنهای یک همزن چند محوره که حول یک محور ثابت دوران دارند، پروانه های یک همزن خورشیدی بطور پیوسته در مخزن حرکت کرده و از همین رو دائما با محصول تازه در تماس هستند.
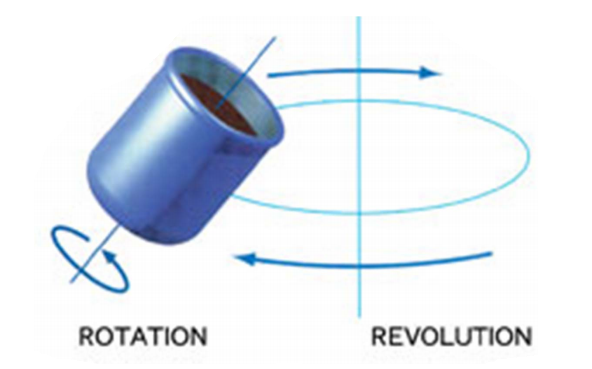
چگونگی کارکرد همزنهای خورشیدی
همانطور که در شکل زیر دیده می شود عملکرد یک همزن خورشیدی ترکیبی از حرکت وضعی (rotation) و انتقالی (revolution) است و به همین جهت برای پراکندن جامد در مایع یا مایع در مایع بهترین انتخاب است.
محاسبات مرتبط با پروژه انتخاب همزن خورشیدی برای شرکت پارس بهشرق
داده های مسئله:
Disperse Plastisol
V= 1200 lit
P= 10 kW Agitator Power
2 Layer Vessel
Viscosity = 80.000 cp
برای این عملیات دیسپرس سه روش وجود دارد که به ترتیب بیان خواهد شد و در پایان به برتری ها و کاستیهای هر یک می پردازیم.
 روش 1- استفاده از یک موتور گیربکس هلیکس برای پروانه Anchor و استفاده از یک موتور ساده برای میکر دیسپرس
روش 1- استفاده از یک موتور گیربکس هلیکس برای پروانه Anchor و استفاده از یک موتور ساده برای میکر دیسپرس
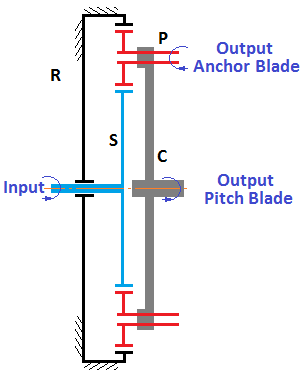
روش 2- استفاده از یک موتور گیربکس خورشیدی برای پروانه Anchor و استفاده از یک موتور ساده برای میکسر دیسپرس
| Revolutions of Elements | Motion | Step No. | |||||
| Ring, R | Sun, S | Pinion, P | Carrier, C | ||||
| +1 | – | + | 0 | C fixed, R rotates 1 rev. anticlockwise | 1 | ||
| +x | – | + | 0 | C fixed, R rotates x rev. anticlockwise | 2 | ||
| + y | + y | + y | + y | Add + y revolutions to all elements | 3 | ||
| y +x | y+ | + y | Total Motion | 4 | |||
اگر ، و دایره گام دنده های P، S و R باشند، داریم
چون تعداد دندانهها متناسب با قطرهای دایره گام است، بنابراین،
اگر تعداد دندانه رینگ را 112 بگیریم و تعداد دندانه خورشیدی را 12 بگیریم تعداد دندانه دنده سیاره ای P برابر با 50 خواهد شد. چون رینگ Rثابت است پس
=0 y =- x y +x
اگر ورودی ما موتوری با سرعت 1450 rpm باشد (سرعت دنده S) خواهیم داشت:
بنابراین دور خروجی Pitch Blade برابر خواهد شد با: و سرعت پروانه لنگری برابر خواهد شد با:
y+
در این چیدمان اگر چه محل دو میکسر بخوبی انتخاب شده است ولی سرعت دو میکسر نامناسب است. در واقع سرعت پروانه Pitch Blade باید حدود سرعت نامی یا دست کم یک سوم سرعت موتور باشد، در حالیکه سرعت پروانه های لنگر شکل چند ده دور بیشتر نیست. متاسفانه امکان تغییر این شرایط وجود ندارد. یا دست کم من با این چیدمان نتوانستم به چنین نتیجه ای برسم.
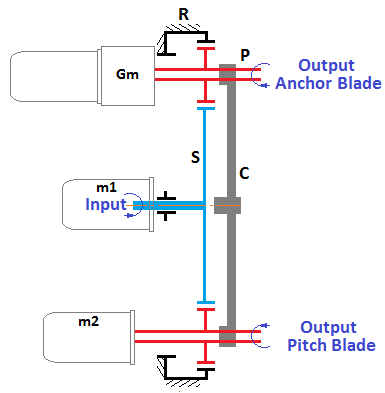
روش 3- استفاده از یک موتور گیربکس خورشیدی بصورت شکل زیر. در این شکل دو چرخ دنده سیاره ای P هر یک بوسیله یک Hollow Shaft به بازوی C وصل شده اند. این شافت های توخالی داخل یاتاقان بندی بازوی C می توانند حرکت دورانی داشته باشند ولی در توپی چرخ دنده سیاره ای C محکم تثبیت شده اند، بطوریکه گشتاور وارد بر این شافت دنده سیاره ای C را به دوران می اندازد.
در این چیدمان اگر محور محرک شافت دنده خورشیدی S، و چرخ دنده داخلی R ثابت باشد. آنگاه دو چرخ دنده سیاره ای P نه تنها توسط موتورهای M1, M2 و Gm بدور محورخود دوران می کنند (حرکت وضعی) بلکه حول محور دنده خورشیدی Sهم حرکت انتقالی خواهند داشت
| Revolutions of Elements | Motion | Step No. | |||
| Ring, R | Sun, S | Pinion, P | Carrier, C | ||
| +1 | – | + | 0 | C fixed, R rotates 1 rev. anticlockwise | 1 |
| +x | – | + | 0 | C fixed, R rotates x rev. anticlockwise | 2 |
| + y | + y | + y | + y | Add + y revolutions to all elements | 3 |
| y +x | y+ | + y | Total Motion | 4 | |
اگر ، و دایره گام دنده های P، S و R باشند، داریم
چون تعداد دندانهها متناسب با قطرهای دایره گام است، بنابراین،
اگر تعداد دندانه رینگ را 112 بگیریم و تعداد دندانه خورشیدی را 12 بگیریم تعداد دندانه دنده سیاره ای P برابر با 50 خواهد شد.
چون رینگ Rثابت است پس
=0 y =- x y +x
اگر ورودی ما موتوری با سرعت 1450 rpm در جهت عقربه های ساعت باشد (سرعت دنده S) خواهیم داشت:
بنابراین حرکت انتقالی Pitch Blade و Anchor Blade برابر و در جهت عقربه های ساعت خواهد بود و سرعت حرکت وضعی هریک متناسب با سرعت خروجی درایو آنها می باشد. اگر چه این روش بسیار قابل انعطاف است و هر تغییری روی آن براحتی امکان دارد ولی متاسفانه تعداد درایوهای این روش بسیار زیاد است و باید اثر نیروهای دینامیکی مثل Moment of Momentums مورد تجزیه و تحلیل قرار بگیرند.
روش 4- استفاده از یک موتور گیربکس خورشیدی بصورت شکل زیر. در این شکل دو چرخ دنده سیاره ای P هر یک بوسیله یک Hollow Shaft به بازوی C وصل شده اند. این شافت های توخالی داخل یاتاقان بندی بازوی C می توانند حرکت دورانی داشته باشند ولی در توپی چرخ دنده سیاره ای C محکم تثبیت شده اند، بطوریکه گشتاور وارد بر این شافت دنده سیاره ای C را به دوران می اندازد.
در این چیدمان اگر محور محرک شافت دنده خورشیدی S، و چرخ دنده داخلی R ثابت باشد. آنگاه دو چرخ دنده سیاره ای P نه تنها توسط موتورهای M1, M2 و Gm بدور محورخود دوران می کنند (حرکت وضعی) بلکه حول محور دنده خورشیدی Sهم حرکت انتقالی خواهند داشت
| Revolutions of Elements | Step. | ||||||
| E | P3, D | S | P2 | P1 | R | C | |
| – | – | +1 | 0 | 1 | |||
| +x | – | + | 0 | 2 | |||
| + y | + y | + y | + y | 3 | |||
| y +x | y+ | + y | 4 | ||||
اگر ، و دایره گام دنده های P، S و R باشند، داریم
چون تعداد دندانهها متناسب با قطرهای دایره گام است، بنابراین،
اگر تعداد دندانه رینگ را 112 بگیریم و تعداد دندانه خورشیدی را 12 بگیریم تعداد دندانه دنده سیاره ای P برابر با 50 خواهد شد.
چون رینگ Rثابت است پس
=0 y =- x y +x
اگر ورودی ما موتوری با سرعت 1450 rpm در جهت عقربه های ساعت باشد (سرعت دنده S) خواهیم داشت:
بنابراین حرکت انتقالی Pitch Blade و Anchor Blade برابر و در جهت عقربه های ساعت خواهد بود و سرعت حرکت وضعی هریک متناسب با سرعت خروجی درایو آنها می باشد.
اگر چه این روش بسیار قابل انعطاف است و هر تغییری روی آن براحتی امکان دارد ولی متاسفانه تعداد درایوهای این روش بسیار زیاد است و باید اثر نیروهای دینامیکی مثل Moment of Momentums مورد تجزیه و تحلیل قرار بگیرند.
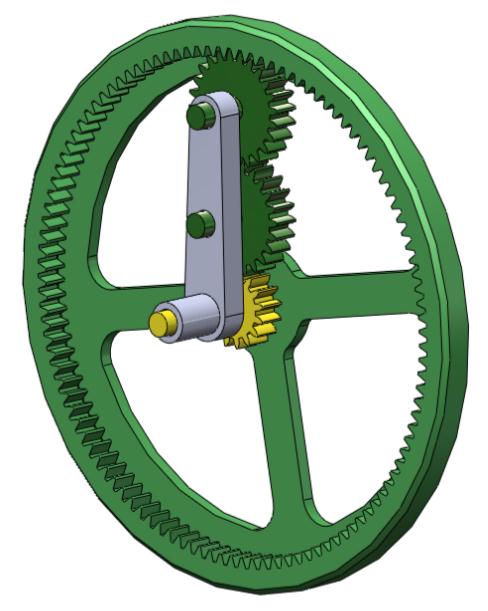
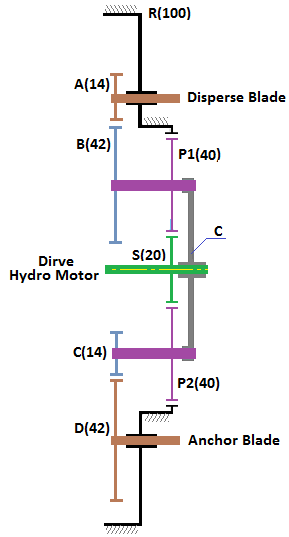
شکل زیر طرح چرخ دنده خورشیدی بالا دیده میشود.